

-
专注环境试验设备的研发与生产
为客户提供可靠,高性价比定制方案

全国服务热线:
完成了检测平台的定位控制子程序设计和数据采集子程序设计后,就可以设计整个检测平台的定位控制与数据采集程序了。整个检测平台的测量点数为30个点,因此需要控制可移动L型皮托管地移动到每个测量点后,才开始启动数据采集,当完成把测量数据显示于输出显示控件后,再控制移动到下一个测量点和进行数据采集。同时在每次测量开始时,整个检测平台需要进行复位,进行系统复位的方法是在机械原点上安装定位传感器,当可移动L型皮托管接触到定位传感器时立即停止,从而完成整个检测平台的机械原点的找正设定。
在每次测量开始时都需要进行复位操作,以完成检测平台工作前的准备工作。根据以上整个检测平台的编程思路,对整个检测平台的软件进行了设计。图5-19是整个检测平台软件的前面板。检测平台软件的后面板程序由于篇幅比较大,在本文中略。

从上面的检测平台软件的前面板可以看出,检测平台软件的前面板由系统设置部分、系统操作部分和系统输出部分构成。其中系统设置的参数包括X、Y、Z、U轴速度以及采样频率,这些参数对于整个检测平台的设置是通用的,因此可以把它们一起放在软件的前面板来进行设置。系统输出由6条喷嘴的测量点构成。根据上文所述的,每条喷嘴均需要测量均距的6个点,对于测量的每个点,都有风速和风温两个输出显示参数以及一个LED显示灯。整个检测平台系统的具体工作过程是:首先是运行检测平台的软件,按下复位按钮,使检测平台系统完成自动复位动作;其次按下启动按钮,检测平台系统开始调用数据采集子程序进行个点的数据采集,把采集到的数据进行处理并显示于前面板上,同时点亮个LED显示灯,表示个点数据测量完成。
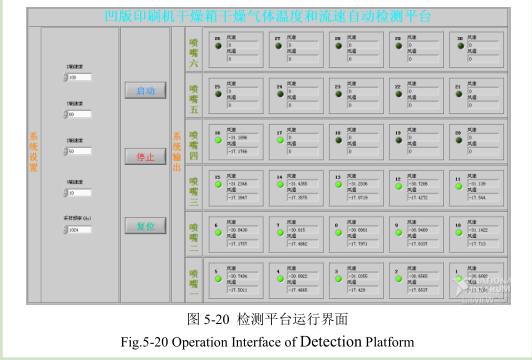
然后,检测平台程序调用定位控制子程序,控制可移动L行皮托管移动到第二个测量点,当定位任务完成后,检测平台系统再调用数据采集子程序进行该点的风速和风温的数据采集、处理和显示,直到该点的测量数据完成后,再同理移动到下一个相邻的测量点,进行新一轮的数据测量;整个检测平台就这样如此一直测量下去,直到测量到喷嘴六的最后一个测量点,即第三十个测量点,从而完成整个检测平台的一次数据测量任务。图5-20给出了整个检测平台软件运行工作过程中的界面。
对于整个检测平台软件的后面板程序,用于完成对每个测量点进行运动定位控制和数据采集任务的LabVIEW程序控制结构是顺序控制结构,即是通过顺序结构里的每个帧用于控制完成每个测量点的定位控制和数据采集任务,同时在每个帧里,均加入一个嵌套的顺序控制结构,以先后完成系统定位和数据采集的要求。因此,对于其他具有不同喷嘴或者需要测量不同点数的干燥箱,只需要相应重设系统的运动控制参数和数据采集参数以及增加或者减少用于控制测量点的帧即可。不过由于时间有限,现在已完成的检测平台系统软件仅可以满足实现每个测量点的风速和风温测量的功能,还存在系统设置参数比较简单和单调,没有充分考虑到检测平台软件程序的容错处理以及增加一些必要的检测平台通用输入输出功能等不足和缺陷,因而在整个检测平台软件程序的改进和完善上还有很多后续的工作需要做。
综上所述,采用阿尔泰USB1020运动控制卡和PCI8757数据采集卡,完全符合整个检测平台系统的功能要求和满足对系统软件开发的兼容性,因而为无缝地完成整个检测平台系统的定位控制和数据采集工作提供了硬件的基础保证;采用NI的LabVIEW软件对检测平台系统的软件进行开发,则具有简单易学、开发周期短、开发效率高、人机交互界面好、软件系统维护方便等特点,因而为检测平台系统的软件开发提供了重要保证。
http://www.dgzhenghang.net
